【SPI】软件SPI库
下载例程代码: 下载代码(CubeIDE) 下载代码(keil)
CubeIDE代码请按照 例程使用方法🔗 导入例程,否则下载的可能不是例程而是其他工程。
本例程演示了如何使用软件SPI库
-
支持同时使用多个SPI实例
-
SPI 主机模式
-
全双工通信
-
支持 CPOL(时钟极性)、CPHA(时钟相位)配置
-
支持时钟速率调节 2.5KHz ~ 200KHz
SPI 简介
SPI(Serial Peripheral Interface)是一种同步串行通信协议,主要用于嵌入式系统中,用于集成电路之间的短距离有线通信。
典型应用场景有:
-
W25QXX 系列 Flash
-
MPU6050 陀螺仪
-
NRF24L01 无线模块等。
一般情况下,SPI 通信有四根线:
-
SCLK:时钟线,由主机产生
-
MOSI:主机输出从机输入,主机向从机发送数据
-
MISO:主机输入从机输出,从机向主机发送数据
-
CS:片选线,用于选择从机
时钟相位和极性(CPOL、CPHA):
-
CPOL:时钟极性,决定时钟信号在空闲时是高电平还是低电平
-
CPOL = 0 时,SCLK 空闲时为低电平
-
CPOL = 1 时,SCLK 空闲时为高电平
-
-
CPHA:时钟相位,决定数据采样时机
-
CPHA = 0 时,数据在第一个时钟沿采样
-
CPHA = 1 时,数据在第二个时钟沿采样
-
-
例如:
-
CPOL = 0,CPHA = 0 时,SCLK 空闲时为低电平,数据在第一个时钟沿采样(上升沿采样)
-
CPOL = 1,CPHA = 0 时,SCLK 空闲时为高电平,数据在第一个时钟沿采样(下降沿采样)
-
CPOL = 0,CPHA = 1 时,SCLK 空闲时为低电平,数据在第二个时钟沿采样(下降沿采样)
-
CPOL = 1,CPHA = 1 时,SCLK 空闲时为高电平,数据在第二个时钟沿采样(上升沿采样)
-
时钟极性和相位的配置于目标芯片有关,需要根据目标芯片的 SPI 时序要求进行配置
SPI 通信流程实例:
-
这是一个典型的 SPI 通信流程,主机通过 SCLK 产生时钟信号,通过 MOSI 向从机发送数据,通过 MISO 从从机接收数据
配置 CPOL = 0,CPHA = 0 ,可见 SCLK 空闲时为低电平,数据在第一个时钟沿采样(上升沿采样)
通信波形文件包含在例程zip包中,可以使用【Saleae Logic 2】软件打开查看

例程讲解
下面介绍了如何使用软件SPI库
1、工程配置
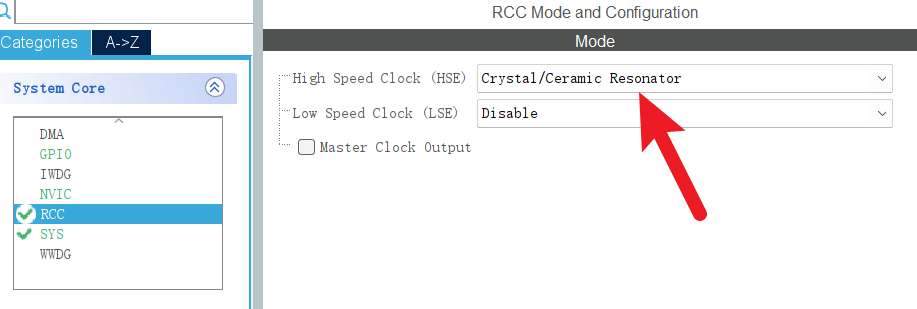
- 开启外部晶振:在Pinout&Configuration -> System Core -> RCC 页面,将 High Speed Clock (HSE) 配置为 Crystal/Ceramic Resonator
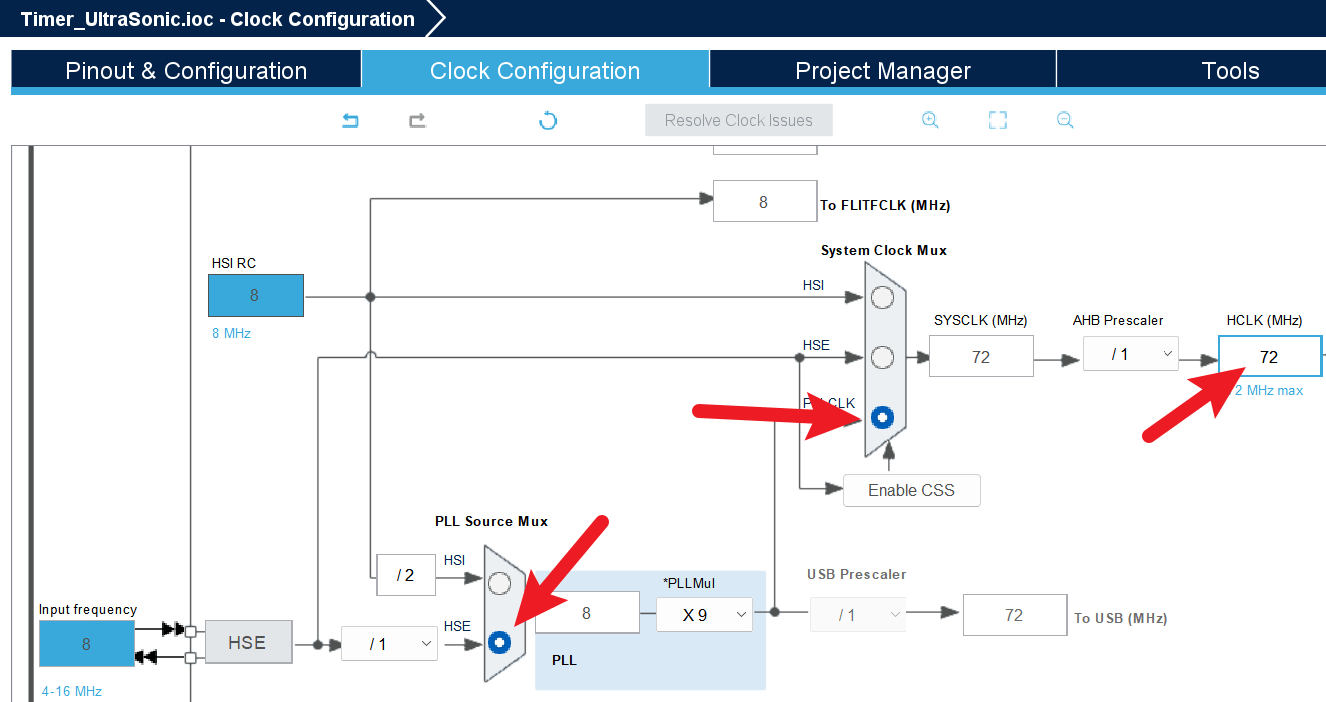
- 配置时钟频率:在Clock Configuration 页面,将PLL Source 选择为 HSE,将System Clock Mux 选择为 PLLCLK,然后在HCLK (MHz) 输入72并回车,将HCLK频率配置为 72 MHz
-
分配引脚:将 PA12、PA15、PB3、PB1 分别设置为 GPIO_Output,并分别设置 User label 为 SPI_SCLK、SPI_MOSI、SPI_MISO、SPI_CS
这几个是学习板左下角的自定义引脚,如果需要使用其他引脚,可以自行修改,任意引脚都可以使用

-
配置GPIO:在 System Core -> GPIO
-
将 PA12、PA15、PB1 的 Maximum output speed 配置为 High
-
将 PB3 的 GPIO Pull-up/Pull-down 配置为 Pull-up
即 SPI_SCLK、SPI_MOSI、SPI_CS 配置为高速输出,SPI_MISO 配置为上拉输入
-

2、代码
(1) 初始化过程
-
拷贝库文件:将 softSPI.c、dwt_stm32_delay.c 文件拷贝到 Core -> Src 目录下,将 softSPI.h、dwt_stm32_delay.h 文件拷贝到 Core -> Inc 目录下。
-
添加头文件:在 main.c 中引用头文件
#include "softSPI.h" -
初始化 SPI 实例结构体: 在 main 函数中初始化 SPI 实例结构体
// 分配 SCLK 引脚
SoftSPI1.SCLK_GPIO = SPI_SCLK_GPIO_Port;
SoftSPI1.SCLK_Pin = SPI_SCLK_Pin;
// 分配 MOSI 引脚
SoftSPI1.MOSI_GPIO = SPI_MOSI_GPIO_Port;
SoftSPI1.MOSI_Pin = SPI_MOSI_Pin;
// 分配 MISO 引脚
SoftSPI1.MISO_GPIO = SPI_MISO_GPIO_Port;
SoftSPI1.MISO_Pin = SPI_MISO_Pin;
// 分配 CS 引脚
SoftSPI1.CS_GPIO = SPI_CS_GPIO_Port;
SoftSPI1.CS_Pin = SPI_CS_Pin;
// 设置 SPI 时钟频率
SoftSPI1.Delay_Time = SPI_FREQ_10KHZ;
// 设置 SPI 时钟极性和相位
SoftSPI1.CPOL = 0;
SoftSPI1.CPHA = 0; -
初始化 SPI 实例: 在 main 函数中初始化 SPI 实例
// 初始化 SPI 实例
SoftSPI_Init(&SoftSPI1);
(2) 进行 SPI 通信
-
使能片选:使用
SoftSPI_CS_Low函数使能片选// 使能片选
SoftSPI_CS_Low(&SoftSPI1); -
收发数据: 使用
SoftSPI_WriteReadBuff函数发送和��接收数据// 读写数据
SoftSPI_WriteReadBuff(&SoftSPI1, tx_buffer, rx_buffer, 4); -
关闭片选:使用
SoftSPI_CS_High函数关闭片选// 关闭片选
SoftSPI_CS_High(&SoftSPI1);