【UART 串口】循环缓冲区+命令解析
下载例程代码: 下载代码(CubeIDE) 下载代码(keil)
CubeIDE代码请按照 例程使用方法🔗 导入例程,否则下载的可能不是例程而是其他工程。
如何使用例程
1️⃣ 编译并下载程序到学习板
2️⃣ 使用配套TYPE-C数据线,将学习板连接到计算机
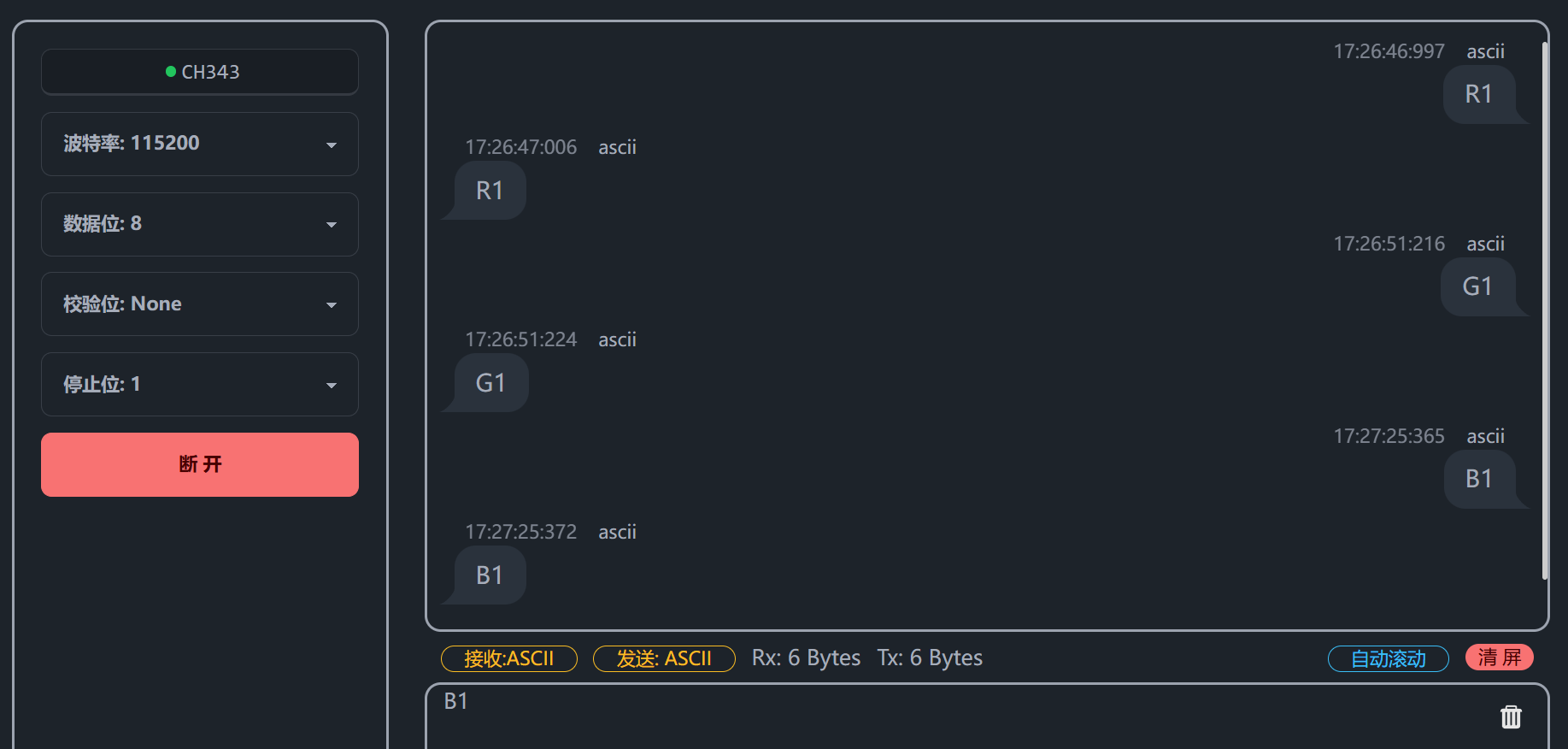
3️⃣ 打开 波特律动 串口助手 在线串口调试助手,点击“选择串口”,选择USB Single Serial
4️⃣ 发送相应的命令测试功能
红色小灯亮起:
AA 05 01 01 B1
红色小灯熄灭 绿色小灯亮起:
AA 07 01 00 02 01 B5
测试长命令解析:
AA 1A 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D 0E 0F 10 11 12 13 14 15 16 17 D8
例程讲解
下面介绍了如何自己实现该例程的功能
1、工程配置
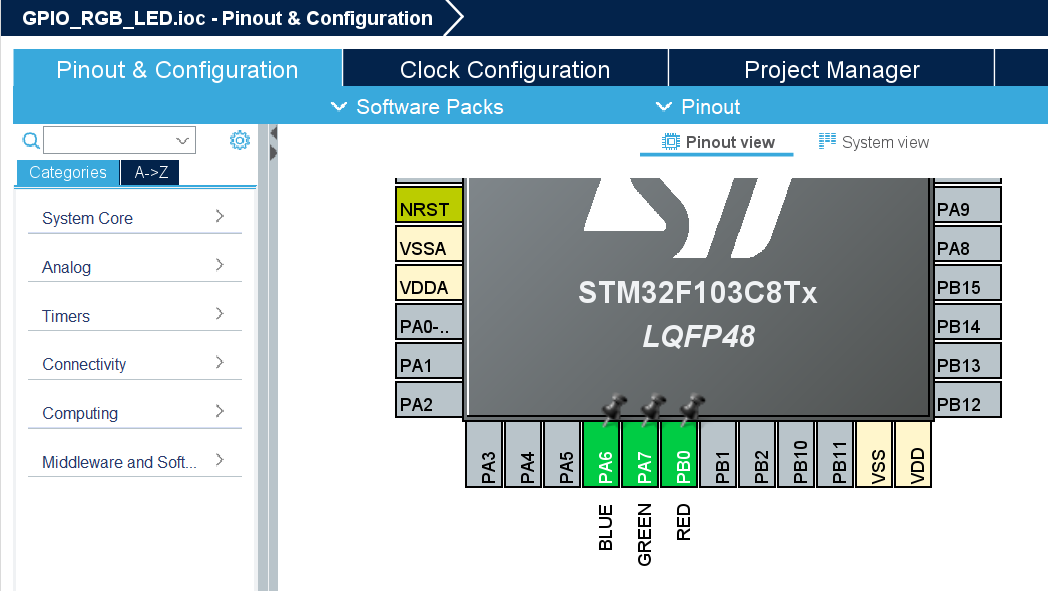
1️⃣ 分配引脚:如图,将 PA6、PA7、PB0 配置为 GPIO_Output,并分别设置 User label 为 BLUE、GREEN、RED
左键点击对应的引脚,选择 GPIO_Output; 右键点击对应的引脚,选择 User label,分别输入 BLUE、GREEN、RED
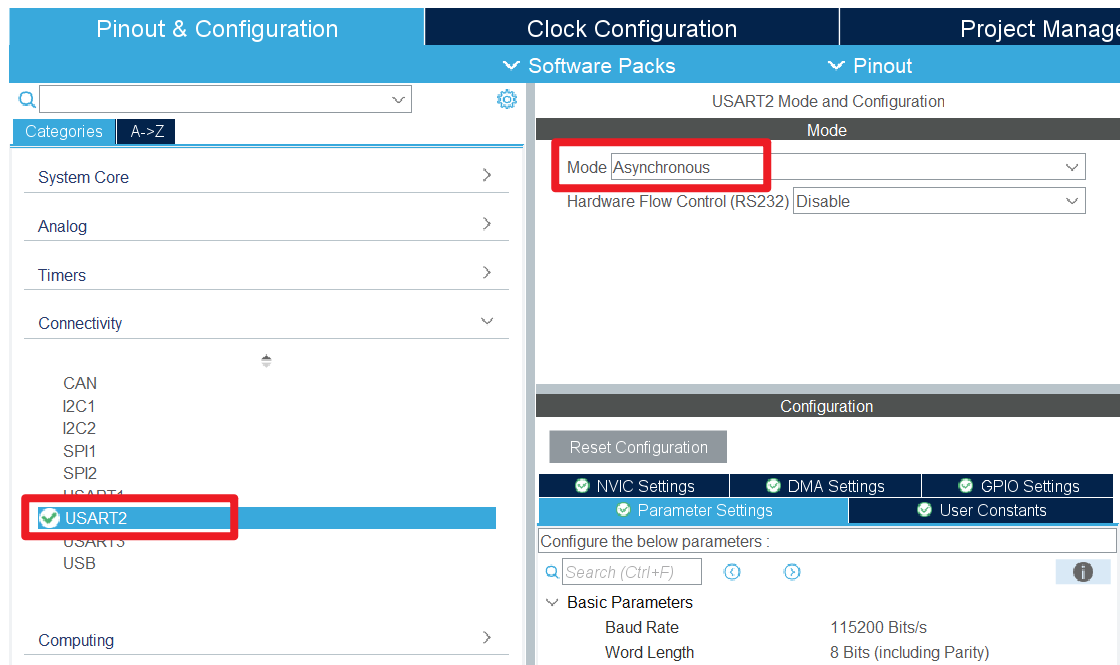
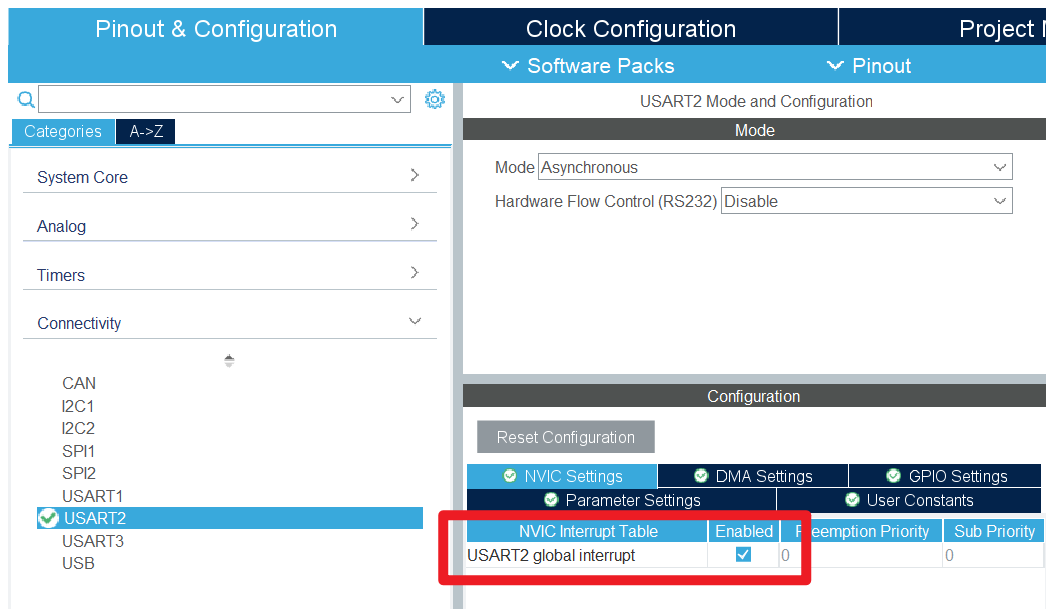
2️⃣ 打开串口2外设:Pinout&Configuration -> Connectivity -> USART2,将 Mode 选择为 Asynchronous
3️⃣ 使能串口中断:在 USART2 -> Configuration -> NVIC Settings 标签卡中,勾选 USART2 global interrupt 的 Enable
2、代码
1️⃣ 在Core/Src文件夹下新建command.c文件
#include "command.h"
// 指令的最小长度
#define COMMAND_MIN_LENGTH 4
// 循环缓冲区大小
#define BUFFER_SIZE 128
// 循环缓冲区
uint8_t buffer[BUFFER_SIZE];
// 循环缓冲区读索引
uint8_t readIndex = 0;
// 循环缓冲区写索引
uint8_t writeIndex = 0;
/**
* @brief 增加读索引
* @param length 要增加的长度
*/
void Command_AddReadIndex(uint8_t length) {
readIndex += length;
readIndex %= BUFFER_SIZE;
}
/**
* @brief 读取第i位数据 超过缓存区长度自动循环
* @param i 要读取的数据索引
*/
uint8_t Command_Read(uint8_t i) {
uint8_t index = i % BUFFER_SIZE;
return buffer[index];
}
/**
* @brief 计算未处理的数据长度
* @return 未处理的数据长度
* @retval 0 缓冲区为空
* @retval 1~BUFFER_SIZE-1 未处理的数据长度
* @retval BUFFER_SIZE 缓冲区已满
*/
//uint8_t Command_GetLength() {
// // 读索引等于写索引时,缓冲区为空
// if (readIndex == writeIndex) {
// return 0;
// }
// // 如果缓冲区已满,返回BUFFER_SIZE
// if (writeIndex + 1 == readIndex || (writeIndex == BUFFER_SIZE - 1 && readIndex == 0)) {
// return BUFFER_SIZE;
// }
// // 如果缓冲区未满,返回未处理的数据长度
// if (readIndex <= writeIndex) {
// return writeIndex - readIndex;
// } else {
// return BUFFER_SIZE - readIndex + writeIndex;
// }
//}
uint8_t Command_GetLength() {
return (writeIndex + BUFFER_SIZE - readIndex) % BUFFER_SIZE;
}
/**
* @brief 计算缓冲区剩余空间
* @return 剩余空间
* @retval 0 缓冲区已满
* @retval 1~BUFFER_SIZE-1 剩余空间
* @retval BUFFER_SIZE 缓冲区为空
*/
uint8_t Command_GetRemain() {
return BUFFER_SIZE - Command_GetLength();
}
/**
* @brief 向缓冲区写入数据
* @param data 要写入的数据指针
* @param length 要写入的数据长度
* @return 写入的数据长度
*/
uint8_t Command_Write(uint8_t *data, uint8_t length) {
// 如果缓冲区不足 则不写入数据 返回0
if (Command_GetRemain() < length) {
return 0;
}
// 使用memcpy函数将数据写入缓冲区
if (writeIndex + length < BUFFER_SIZE) {
memcpy(buffer + writeIndex, data, length);
writeIndex += length;
} else {
uint8_t firstLength = BUFFER_SIZE - writeIndex;
memcpy(buffer + writeIndex, data, firstLength);
memcpy(buffer, data + firstLength, length - firstLength);
writeIndex = length - firstLength;
}
return length;
}
/**
* @brief 尝试获取一条指令
* @param command 指令存放指针
* @return 获取的指令长度
* @retval 0 没有获取到指令
*/
uint8_t Command_GetCommand(uint8_t *command) {
// 寻找完整指令
while (1) {
// 如果缓冲区长度小于COMMAND_MIN_LENGTH 则不可能有完整的指令
if (Command_GetLength() < COMMAND_MIN_LENGTH) {
return 0;
}
// 如果不是包头 则跳过 重新开始寻找
if (Command_Read(readIndex) != 0xAA) {
Command_AddReadIndex(1);
continue;
}
// 如果缓冲区长度小于指令长度 则不可能有完整的指令
uint8_t length = Command_Read(readIndex + 1);
if (Command_GetLength() < length) {
return 0;
}
// 如果校验和不正确 则跳过 重新开始寻找
uint8_t sum = 0;
for (uint8_t i = 0; i < length - 1; i++) {
sum += Command_Read(readIndex + i);
}
if (sum != Command_Read(readIndex + length - 1)) {
Command_AddReadIndex(1);
continue;
}
// 如果找到完整指令 则将指令写入command 返回指令长度
for (uint8_t i = 0; i < length; i++) {
command[i] = Command_Read(readIndex + i);
}
Command_AddReadIndex(length);
return length;
}
}
2️⃣ 在Core/Inc文件夹下新建command.h文件
#ifndef INC_COMMAND_H_
#define INC_COMMAND_H_
#include "main.h"
#include <string.h>
uint8_t Command_Write(uint8_t *data, uint8_t length);
uint8_t Command_GetCommand(uint8_t *command);
#endif /* INC_COMMAND_H_ */
3️⃣ 在main.c中 引入command.c 定义串口接收数组 实现串口接收空闲中断回调函数
注意将代码写到对应的注释对中
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "command.h"
/* USER CODE END Includes */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
uint8_t readBuffer[10];
/* USER CODE END PD */
/* USER CODE BEGIN 0 */
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size){
if (huart == &huart2){
Command_Write(readBuffer, Size);
HAL_UARTEx_ReceiveToIdle_IT(&huart2, readBuffer, sizeof(readBuffer));
}
}
/* USER CODE END 0 */
3️⃣ 开启串口接收 while循环中获取命令 根据命令控制小灯
rx_data[0] 第一个字符为小灯(0x01:红色,0x02:绿色,0x03:蓝色)
rx_data[1] 第二个字符为状态(0:灭,1:亮)
/* USER CODE BEGIN 2 */
HAL_UARTEx_ReceiveToIdle_IT(&huart2, readBuffer, sizeof(readBuffer));
uint8_t command[50];
int commandLength = 0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
commandLength = Command_GetCommand(command);
if (commandLength != 0){
HAL_UART_Transmit(&huart2, command, commandLength, HAL_MAX_DELAY);
for (int i = 2; i < commandLength - 1; i += 2){
GPIO_PinState state = GPIO_PIN_SET;
if (command[i + 1] == 0x00){
state = GPIO_PIN_RESET;
}
if (command[i] == 0x01){
HAL_GPIO_WritePin(RED_GPIO_Port, RED_Pin, state);
}else if (command[i] == 0x02){
HAL_GPIO_WritePin(GREEN_GPIO_Port, GREEN_Pin, state);
}else if (command[i] == 0x03){
HAL_GPIO_WritePin(BLUE_GPIO_Port, BLUE_Pin, state);
}
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}